辅助骨骼系统KineDriver笔记
这个是Square Enix在2019年分享的角色动画相关的笔记。
原文:www.jp.square-enix.com/tech/library/pdf/CEDEC2019_KineDriver.pdf
系统概要
辅助骨骼系统简介
辅助骨骼系统主要用于提升蒙皮动画的效果,其目的是为了提高骨骼动画的表现,所以并不与实际存在的骨骼完全对应。
在设计上,由骨骼进行驱动。通过骨骼的运动驱动数值,其结果不仅可以用于蒙皮动画的表现,也可以用于Shader和材质等特效。
因此,辅助骨骼系统并不仅是一个工作于资源制作环境下的工具,而是一个在资源制作和实际运行环境中同时存在,并且能够保证在两个环境下的运行效果一致性的系统。
这么做的好处主要有两个,首先,可以降低动画资源的大小,同时,还可以方便在运行时进行动态的调整。
版本历史上看,一开始是使用softimage的,后面换到了maya上,到3.0版本已经支持使用图形化界面来拖节点的编辑形式了。
由于提供了中间文件,可以方便的在各种引擎环境下运行,也能导入到MotionBuilder中,但是辅助骨骼的制作还是使用的Maya。
功能和概念
系统内共有三种控制器(operator),source、target和constraint。
源和目标控制器
源控制器可以从多个骨骼获取需要的状态并对其进行插值混合。
坐标空间上,默认使用父节点作为local space的坐标参考,同时也支持指定其他骨骼作为坐标参照。
旋转表现
旋转表现有两种方式
- Bend&Roll,将旋转分解到水平方向和竖直方向,方便美术理解
- Expmap,使用四元数的对数,主要用于程序自动生成逻辑
对于Bend&Roll,在欧拉角的处理上有一些问题。首先,欧拉角在计算上具有一些复杂度,而且同一个状态所对应的欧拉角并不唯一,例如(0,90,60)和(-30,90,30)是同一个姿势。同时,在运行时通常引擎内部都是采用四元数的,将其转换回欧拉角时便无法保证能够回到预期的那个欧拉角。
因此最终采用了球极平面投影的方法,来对旋转角度中的水平角度进行处理。处理方式上,将起始位置的朝向分解为vx,vy和vz。将到达目标旋转vx’所需要的角度分解为θh和θv。详细的公式可以看图:
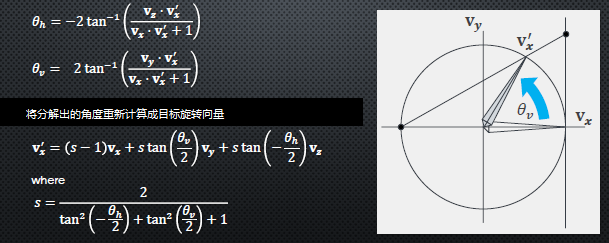
Bend&Roll在实际使用时,水平旋转和竖直旋转的应用顺序可以根据不同的骨骼进行配置,方便在使用时进行直观的理解。
Expmap则没有顺序上的问题,程序内部直接计算结果并进行控制。
缩放表现
缩放同样采用对数空间进行内部控制,采用对数是为了获得更大的精度空间,如下图所示:
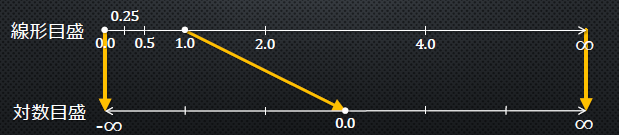
不过ppt里面说没有实装。
节点图支持
可以使用图形化的方式对控制器进行操作,主要提供了以下的节点:
- EZParamLinkLinear(线性插值)
- EZParamLink(简单贝塞尔插值)
- LinkWith(DrivenKey位置链接)
- RBFInterp(支持多个输入输出的链接)
- Expr(自定义表达式)
节点名和功能微妙的没有对上,但是原文就是这样的。
DrivenKey,查了下是maya的功能,就不详细的去看了。RBF后面有说明。
约束控制器
与节点图不同的,基于约束的控制器。
- Position:位置约束,可以基于多个源进行计算
- Orientation:朝向约束,可以基于多个源进行计算
- Dirction:让旋转指向目标,3点模式可以额外控制水平旋转
紧贴表面
约束控制器也提供紧贴表面的功能,根据Position和Orientation约束以及目标表面的骨骼权重进行计算。
在制作Bonamik的引导骨骼的时候经常用到。
工作流
Maya中的资源制作
似乎是使用了maya的插件功能,节点图部分使用了C++的实现,导出和界面之类的功能使用了Python。
节点在显示时使用的是惯用的单位,在连接节点时会自动插入UnitConversion统一进行单位换算。
中间文件
中间文件采用xml的形式进行输出。
文件中保存了各种控制器的的节点的输出,以及节点之间的连接。
在进行文件输出时,可以指定缩放倍数,方便在使用不同单位的引擎中进行使用。
UE4插件
为了方便在项目中复用,进行了插件化。
模块构成,直接上图:

使用上提供了两种方式
- 动画节点:使用标准的动画控制流程,无法预览KineDriver的功能
- Component版:作为SkeletonMesh的子组件,在tick中对骨骼进行更新,可以预览效果
提供了动画通知用于在动画的分段中关闭KineDriver。
对于与Bonamik的兼容关系,分开使用的时候会使用AddTickPrequist来决定调用顺序。另外似乎还有将KineDriver和Bonamik统合在一起的插件。
数据流程直接上图:

AssetUserData
使用了AssetUserData进行数据的存储,方便在骨骼数据上直接添加和修改数据,通过引用指向具体的导入资源。
将数据放在骨骼上的好处是可以不必调整componnet的属性就直接对辅助骨骼的资源进行修改。
缩放传递
在Maya中,对骨骼的缩放不会传递到子骨骼。
而在UE4中则会进行缩放的传递,为了保持效果的一致性,在UE4中作了处理,对于TargetScaleOp的骨骼的子骨骼进行缩放的重新设置。
功能实装
表达式
提供基本的表达式支持,语法尽量的精简化了,不会使用for这些循环的语句。

主要使用一些内置的函数,同时添加对三维向量和四元数的支持。运算上支持了基本的四则运算和括号。
对于输入的参数,则转换到x1,x2,…,xn的形式进行记录。
在maya内部使用时,会将转换后的表达式使用[调度场算法]进行转换和计算。如果要存储到中间文件的话,会将二进制代码转换为汇编语句的格式。各个游戏引擎加载时则重新将汇编语句转换为二进制代码。
之所以会用到表达式是因为有很多的分支需求,同时有的用几行表达式就能做好的事情用节点就要拖半天,所以需求也比较大。即便初期有预先设置很多功能节点,但是最后还是使用表达式具有更高的灵活性。
RBF插值
RBF总之就是一种拟合的方式,RBF本身可以参考[径向基函数],RBF插值可以参考[Radial basis function interpolation]。
这边有很大的篇幅中介绍这个算法的实现和原理,其实主要的目的是让插值变得更加平滑。
辅助骨骼自动生成
通过在特定姿态时美术已经调好的mesh状态,与完全没有调节的默认骨骼在这个状态的表现之间对比,自动的生成辅助骨骼。
使用了[Smooth Skinning Decompostion with Rigid Bones] ,简称SSDR。
主要的功能就是,对具有J个顶点的模型,使用N个形变示例动画,尝试生成D个骨骼来做一个蒙皮的操作。
由于很难同时对骨骼的位置和蒙皮的权重同时进行最优化处理,所以会分别进行十次来试图逼近最优解。

进行简单的列出
a. 主骨骼没有调整的情况下,使用SSDR对权重进行最优化处理
b. 添加指定数量的辅助骨骼
c1. 使用SSDR进行权重最优化处理
c2. 暂时指定辅助骨骼的父骨骼
c3. 使用SSDR对辅助骨骼的位置进行最优化处理
d. 决定辅助骨骼的父骨骼,以及自动控制用的RBF插值设定。
其中c的步骤就是要执行10次的步骤。
添加指定数量的辅助骨骼
这个过程只会执行一次,但是其操作内部需要进行多次迭代才能完成。

蒙皮权重最优化
对一开始的公式中的[二次规划]中的w进行单独求解。
在整个过程中会多次使用到,虽然角标写的是SSDR。但是额外参考了Computer Graphics Gems JP 2015的向井老师的分享。在辅助骨骼的生成中,为了使得最优化的求解过程更加安定,进行了以下的优化:
- 移除参考动画中的重复顶点
在对角色的姿态进行学习时,从单独的顶点来看会有完全没有移动的帧存在
- 对骨骼进行合并
会出现对于某一个顶点而样,有多个骨骼的给出的变换结果相同的情况。此时对这些骨骼进行合并作为一个骨骼来计算,获得的最优化权重结果则按照原本的权重比例分散回去。
辅助骨骼的位置最优化
步骤c3,参考的还是上面的CGG JP2015的分享,同时参考了[Horn 1987]以及[Mukai 2018]的缩放传递控制。

以点群为单位进行适配,来获得最佳的位置、旋转和缩放。
这里面原文是Transform,所以包含了Translation,Rotation和Scale。只是一时找不到合适的中文替代所以翻成了位置。
暂时指定辅助骨骼的父骨骼
步骤c2,这个步骤只有在使用了scale的计算时才会需要,在进行辅助骨骼计算时,为了计算的稳定性,是在本地旋转为0的情况下进行的。此时应用缩放会产生较大的误差,因此要暂时寻找到父骨骼并转换到骨骼空间之后再进行缩放处理,这个父骨骼可以随便找一个,主要的目的是为了将计算转换到骨骼空间去。


说实话还没有仔细看过计算过程,所以只是把自己的猜测描述了下。
决定父骨骼以及RBF配置
最终的步骤d,计算出辅助骨骼以及其被主骨骼驱动的形式。

生成辅助骨骼的自动控制总共有四个步骤:
- 从蒙皮权重来寻找候补驱动者
从本辅助骨骼所驱动的顶点来寻找原本驱动这些顶点的主骨骼
- 从候补驱动中寻找父骨骼
在所有的候补中寻找误差最小的
- 从剩余的候补中选择RBF用骨骼
选择能够尽量覆盖RBF插值的1~2个骨骼
- RBF关键点修正
从没有关键点的情况下误差最大的地方开始插入关键点
总结
本来是从FF7的动画分享过来的,整个系统的原理其实还是挺清晰的。只是后面自动生成的部分使用了很复杂的计算逻辑,由于没有太过深入的打算,所以详细的公式以及额外引用的论文就没有去参考了,所以可能会有意思不明确的地方。